
Промышленный уборочный робот без точной навигации — это просто дорогая машина, которая врезается в стены. Именно система навигации определяет, сможет ли робот работать автономно или потребует постоянного присмотра оператора.
Роботы iTR используют технологию Sensor Fusion — объединение нескольких типов датчиков в единую интеллектуальную систему. Каждый датчик отвечает за свою задачу, а вместе они дают роботу полное понимание пространства. Как именно это работает — разберём каждую технологию.
LiDAR — лазерные глаза робота
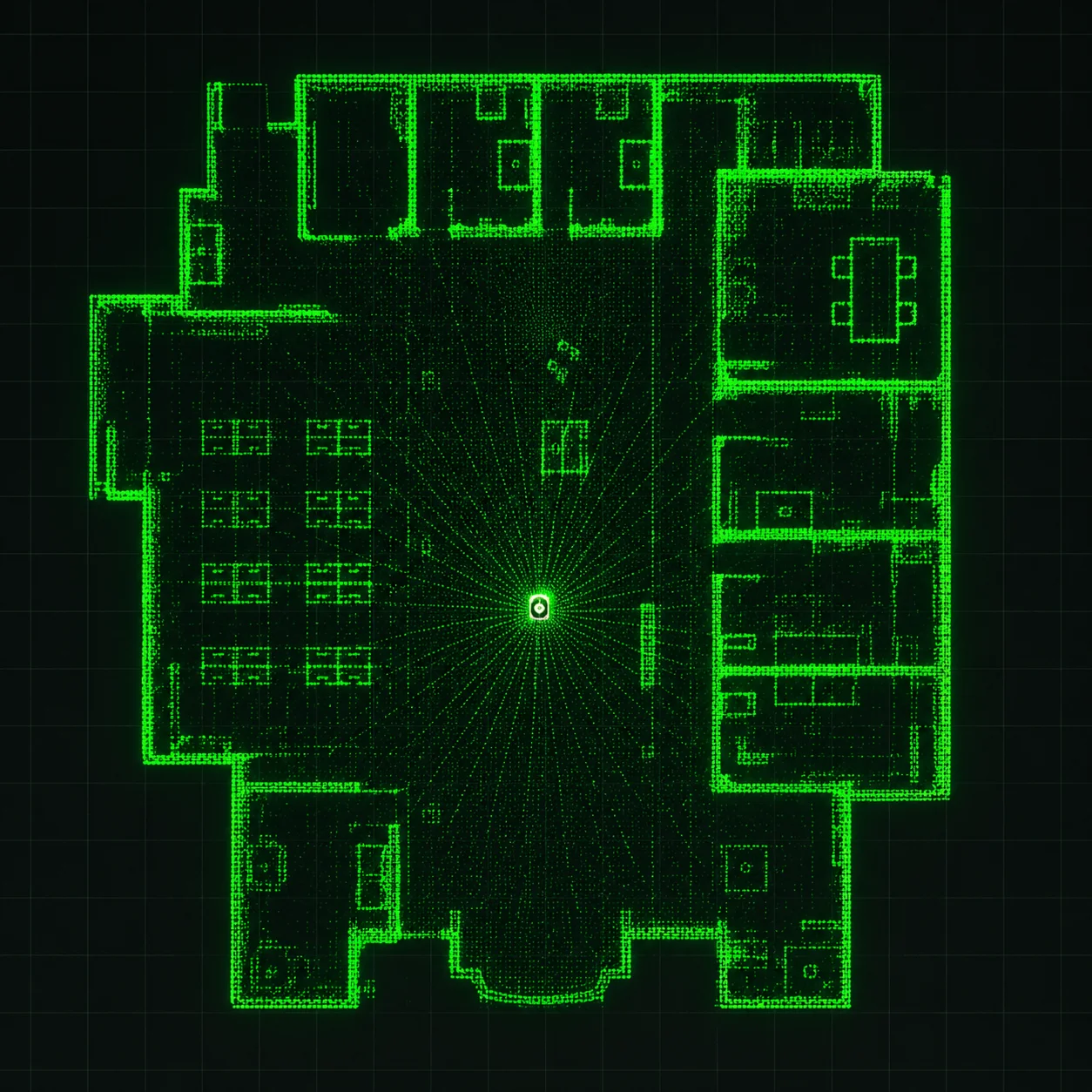
LiDAR (Light Detection and Ranging) — это вращающийся лазерный дальномер, который делает тысячи замеров в секунду. Он выпускает невидимые лазерные лучи во все стороны, измеряет время их отражения и мгновенно строит точную карту помещения.
Главное преимущество LiDAR — он не зависит от освещения. Робот одинаково точно ориентируется в залитом светом торговом центре и на тёмном складе в ночную смену. Точность построения карты — до сантиметра.
В роботах iTR используются два типа LiDAR:
2D LiDAR сканирует пространство в одной плоскости — как если бы вы посветили фонариком горизонтально на 360°. Этого достаточно для точной навигации в помещениях с ровным полом. Устанавливается в моделях C2, C2 Pro и iTRmop.
3D LiDAR добавляет вертикальное измерение — робот видит не только стены, но и объекты на разной высоте: свисающие провода, полки, ступени. Используется в моделях M2 Pro и iScrubbot 300, где масштаб помещений и сложность среды требуют объёмного восприятия.
Structured Light Depth Camera — трёхмерное зрение
Камера структурированного света работает по тому же принципу, что и Face ID в смартфоне. Она проецирует невидимую инфракрасную сетку из тысяч точек на окружающие объекты и по искажению этой сетки мгновенно вычисляет расстояние и форму каждого предмета.
Зачем это роботу? LiDAR отлично строит карту стен и крупных объектов, но мелкие предметы на полу — кабели, пороги, края мебели — ему даются сложнее. Depth Camera заполняет этот пробел: она создаёт детальную 3D-модель пространства прямо перед роботом и позволяет ему аккуратно обходить даже небольшие препятствия.
Устанавливается в моделях C2 и C2 Pro (Structured Light Camera) и M2 Pro (3D Depth Camera).

Ultrasonic Radar — невидимый щит безопасности
Ультразвуковой радар — это эхолокация. Робот посылает звуковые волны на частоте, не слышимой человеком, и по времени возврата эха определяет расстояние до объекта.
У ультразвука есть уникальное преимущество: он обнаруживает прозрачные и отражающие поверхности, которые невидимы для лазера и камеры. Стеклянные двери, зеркальные колонны, прозрачные перегородки — всё это ультразвуковой радар видит без проблем.
В роботах iTR ультразвуковые датчики расположены по периметру корпуса и работают как защитный щит: если на пути внезапно появляется человек или объект — робот реагирует за 0.3 секунды и останавливается или объезжает препятствие.
Используется в моделях C2, C2 Pro, M2 Pro и iTRmop.

RGB Camera — искусственный интеллект на борту

RGB-камера — это цветная камера с необычными возможностями. Встроенный AI-модуль в реальном времени анализирует изображение и распознаёт объекты: людей, мебель, мусор, лужи, провода на полу.
Но самое важное — камера умеет прогнозировать движение. Если человек идёт навстречу роботу, система вычисляет его траекторию и заранее корректирует маршрут, не дожидаясь сближения. Это критически важно для работы в людных местах — торговых центрах, аэропортах, больницах.
Устанавливается в моделях C2 Pro и iTRmop.
Sensor Fusion — когда всё работает вместе
Каждый датчик по отдельности — это компромисс. LiDAR не видит стекло. Камера бесполезна в темноте. Ультразвук не различает форму объекта. Но когда все датчики работают одновременно и обмениваются данными — робот получает полное представление об окружающей среде.
Эта технология называется Sensor Fusion — слияние данных от нескольких сенсоров в единую картину мира. Точно такой же принцип используется в беспилотных автомобилях.
Именно поэтому iTR не экономит на датчиках — каждая модель получает оптимальную комбинацию сенсоров под свои задачи.
